![[Home]](ers7_bone.jpg) DailyJournal
DailyJournal
LabBook | RecentChanges | PreferencesStarted Labbook 2011.
23 August, 2010
- Made another version of the Aibo' program for the opening ceremony. teleop.u is tested with Telecommande on syntax errors and tested on functionallity. The headbutton controls the mouth; the middle back-botton starts and stops constrained walking; the front and rear button force the Aibo to do one step in that direction (even when there is an obstacle). Also tried to allow a turn, but pushing two buttons at the same time triggered multiple behaviors at the same time.
5 August, 2010
- Measured the values of the mouth. Open is -58, closed is -3, AiboBone is -28 (measured 3x).
3 August, 2010
- Mounted two Matchbox-cars and a piece of pipe under the button. The Aibo was more than able to pull this construction:
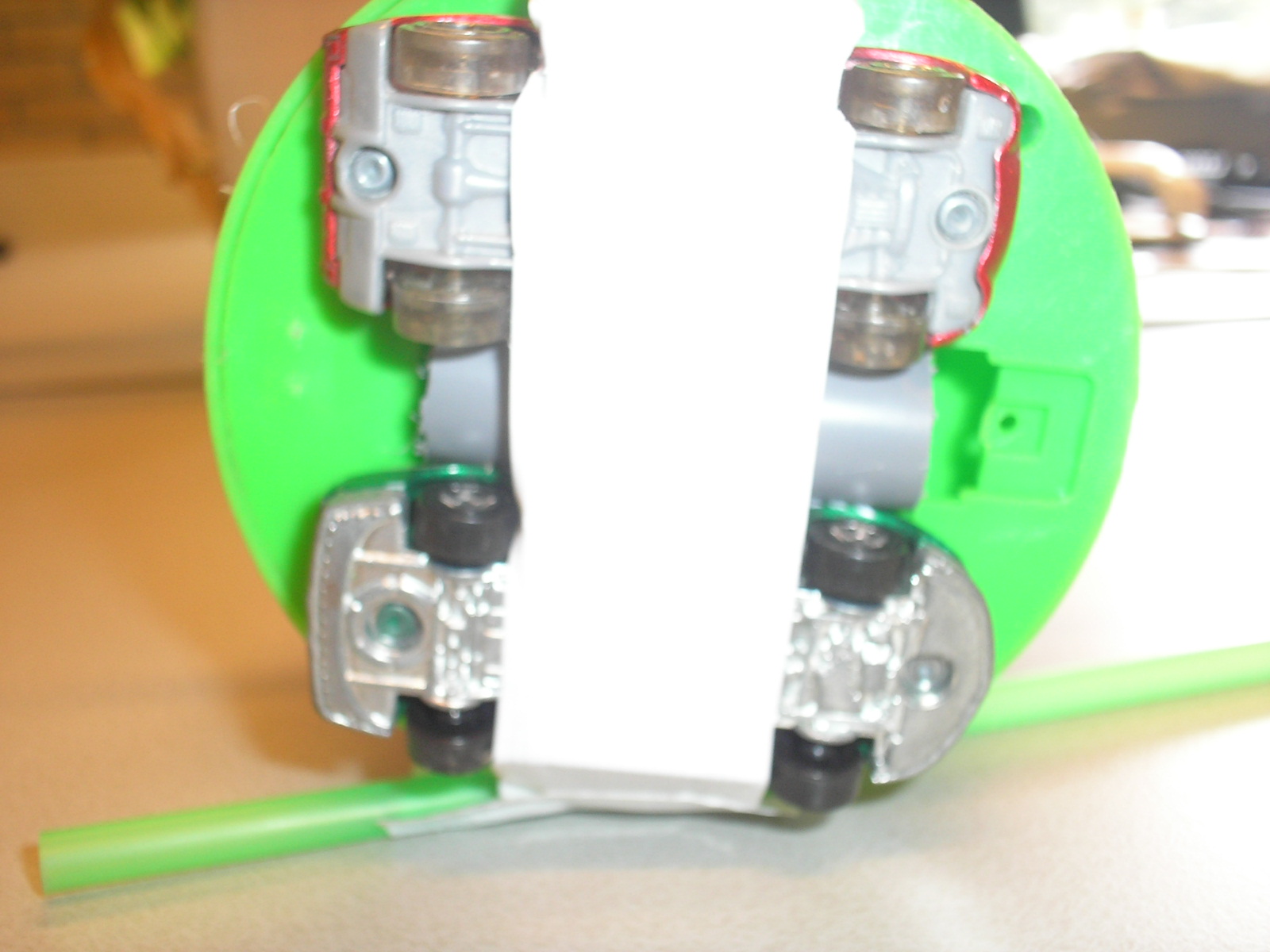
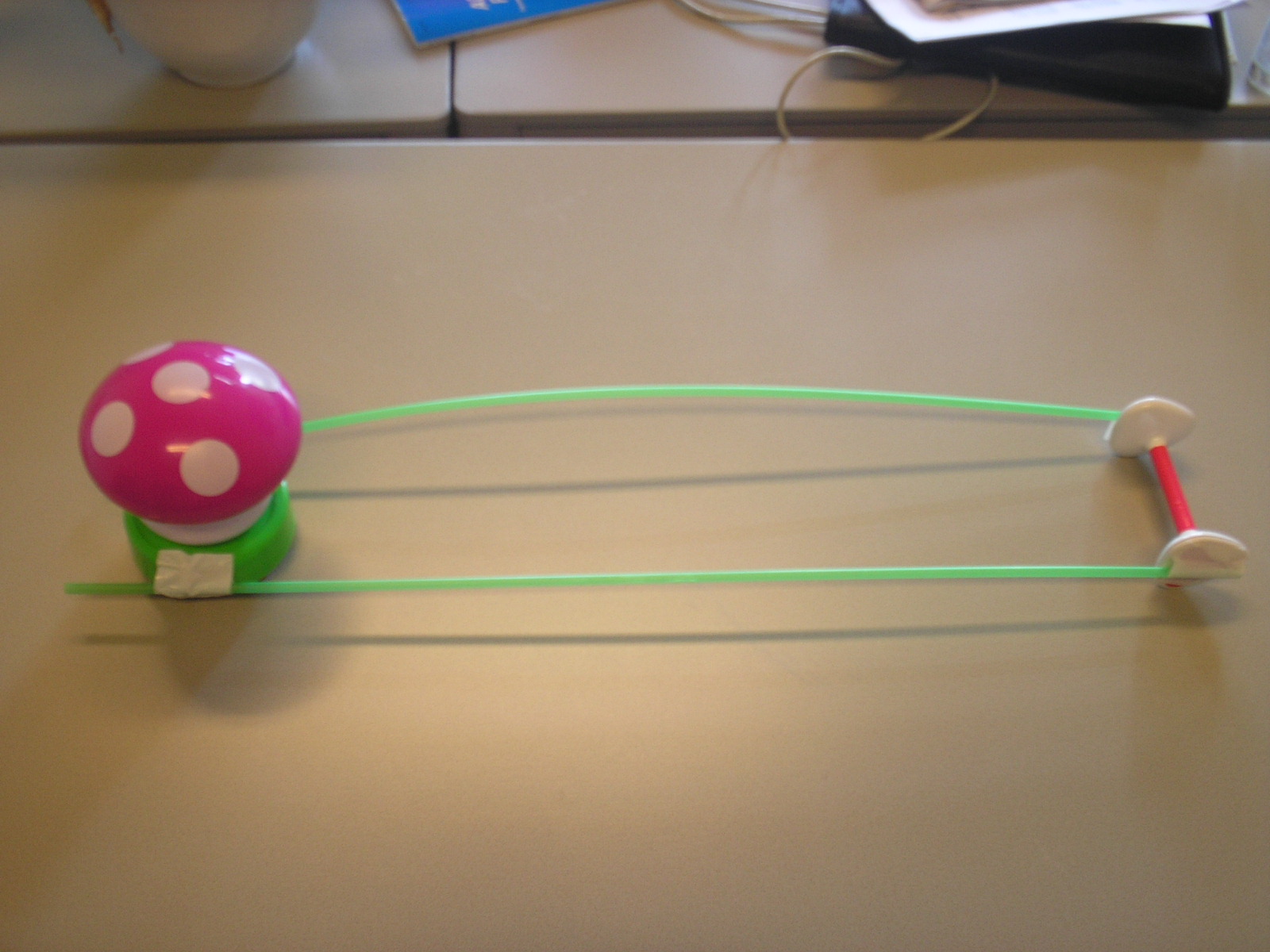 .
.
- Couldn't find Aibo Telecommande on the Gostai site, but the version 1.5 (Nov 2007) is still available at sourceforge. To make the program from source, you need Qt 4.2.2, LibUrbi 1.5 and Qwt 5.0.0.
- Found binary-package of Telecommande at u0152. Nice program, but no syntax spelling for urbiscript.
- Urbi SDK not only installs the Urbi Console on the given location, but also the Gostai Engine Runtime in Program Files. The bin directory contains programs like urbi-ping,urbi-bandwidth.
2 August, 2010
- Made a copy of the ZSB 2010 urbi-stick. Stick contained both wave, dance and swiffer code. Changed the urbi.ini to walk2.u, which is the swiffer-code. Front back-button opens the mouth. The head button closes the mouth and starts the walk. Hitting the middle back-button stops the robot and activates hallelujah. Bobby tilted after the hallelujah :-).
- Created my own urbi-1.5 script, which open and closes his mouth at the front button and starts walking on the middle button. The robot should pause at the head-button, but this is ignored (to be found out). Urbi Remote can connect to the aibo with adress 192.168.0.102, but I need a editor (as TeleCommand). Gosta is already at version 2.1 of Urbi (including ROS interface). Downloaded UrbiConsole 2.1. Did Connect (reports correct urbi-version on MS (version 1.5)). Console->Send UrbiScript File, typed load("pull.u'); and called robot.work. Got the following error-message:
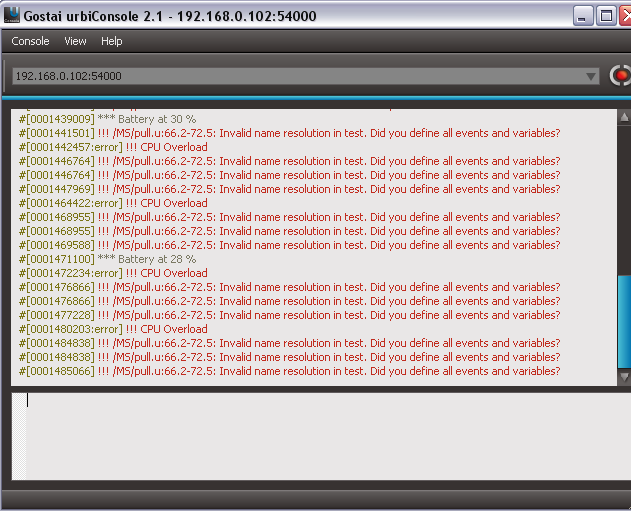
Tried to change the variable name pause to pauseIndicated (protected keyword?). Found out that I misspelled headSensor (lower case). Now it works, although the button keeps toggling between pause and continue (depended how long you push the button). Uploaded corrected script.
14 April, 2010
- Looked at DAT/RobotControl/bars/ColorTable64.cpp. Should be equivalent for Nao and Aibo.
- Tried to rebuild RobotControl. Many errors related to Nafxcwd.lib. Due to change /MT to /MD at 5 Sept 2006.
- from the following list, only libcmt and libcmtd have to be ignored/added:
libc.lib libcd.lib libcmt.lib libcmtd.lib msvcrt.lib msvcrtd.lib nafxcw.lib nafxcwd.lib ..\Build\SimRobotForRobotControlStaticLink\Release\SimRobot - Removed the nafxcw.lib and nafxcwd.lib from this list, and added /FORCE:MULTIPLE at command line, and _RobotControl compiles.
- Had to do dos2unix on .\Make\make_bashfiles_exe.bash.
- Exectuble fails on opening coltable.c64. Added breakpoints and doing Debug.
- Description of the colortable toolbar was in TechReport 2005 Appendix.
- Should declare _CRT_SECURE_NO_DEPRECATE to prevent all warnings about strcpy (use strcpy_s instead).
- Depend-projects compiles and linked.
- Router starts a makefile which calls g++. Probably an older version of g++ (3.4.4), because many complains. Should coincide with /usr/local/OPEN_R_SDK distribution.
- OPEN_R_SDK is in D:\install\aibo\GT-install.zip. Uitgepakt in /usr/local.
- PotentialFields now builds.
- Stopped at _Simulator. Rouge is back, time to concentrate on the Nao's again.
14 January 2010
- Visit from LG. Prepared demo. Three robots are still operational: Shaky, Mina and Moos. Carlos and Bobby also work, but only with Aibo Mind. Moos makes a lot of noise. Mina head scan is quite shaky.
- Prepared four memorysticks: UvA 1 = Blue 1, DL5 = Blue 2, DL2 = Red 2, DL1(141) = Red 1.
- On pc-unreal, DT-jurgen was not working, but DT2006 was.
Labbook 2008
Labbook 2007
April, May, June 2006
January, February, March 2006
October, November, December 2005
July, August, September 2005
April, May, June 2005
January, February, March 2005
October, November, December 2004
July, August, September 2004
April, May, June 2004
January, February, March 2004
Formatting Help?
- Usemod Wiki Text Formatting Rules http://www.usemod.com/cgi-bin/wiki.pl?TextFormattingRules